
This document is relevant for: Trn2
NeuronCore-v3 Architecture#
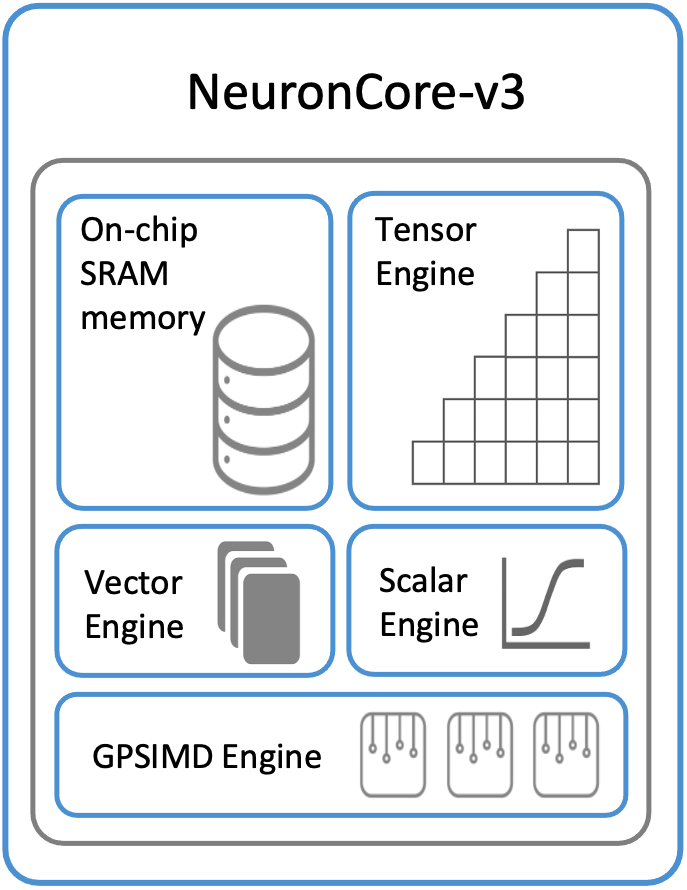
NeuronCore-v3 is the third-generation NeuronCore that powers Trainium2 chips. It is a fully-independent heterogenous compute unit consisting of 4 main engines: Tensor, Vector, Scalar, and GPSIMD, with on-chip software-managed SRAM memory to maximize data locality and optimize data prefetch. The following diagram shows a high-level overview of the NeuronCore-V3 architecture.
NeuronCore-v3 is made up of the following components:
On-chip SRAM#
Each NeuronCore-v3 has a total of 28MB of on-chip SRAM. NeuronCore-v3 on-chip SRAM is software-managed to maximize data locality and optimize data prefetch.
Tensor Engine#
Tensor engines are based on a power-optimized systolic array. They are highly optimized for tensor computations such as GEMM, CONV, and Transpose. Tensor Engines support mixed-precision computations, including cFP8, FP16, BF16, TF32, and FP32 inputs and outputs. A NeuronCore-v3 Tensor Engine delivers 158 cFP8 TFLOPS, and 79 BF16/FP16/TF32 TFLOPS of tensor computations.
Like NeuronCore-v2, NeuronCore-v3 supports control flow, dynamic shapes, and programmable rounding mode (RNE & Stochastic-rounding). NeuronCore-v3 also supports adjustable exponent biasing for the cFP8 data type.
The NeuronCore-v3 Tensor Engine also supports Structured Sparsity, delivering up to 316 TFLOPS of cFP8/FP16/BF16/TF32 compute. This is useful when one of the input tensors to matrix multiplication exhibits a M:N sparsity pattern, where only M elements out of every N contiguous elements are non-zero. NeuronCore-v3 supports several sparsity patterns, including 4:16, 4:12, 4:8, 2:8, 2:4, 1:4, and 1:2.
Vector Engine#
Optimized for vector computations, in which every element of the output is dependent on multiple input elements. Examples include axpi operations (Z=aX+Y), Layer Normalization, and Pooling operations.
Vector Engines are highly parallelized, and deliver a total of 1 TFLOPS of FP32 computations. NeuronCore-v3 Vector Engines can handle various data-types, including cFP8, FP16, BF16, TF32, FP32, INT8, INT16, and INT32.
Scalar engine#
Optimized for scalar computations in which every element of the output is dependent on one element of the input. Scalar Engines are highly parallelized, and deliver a total of 1.2 TFLOPS of FP32 computations. NeuronCore-v3 Scalar Engines support multiple data types, including cFP8, FP16, BF16, TF32, FP32, INT8, INT16, and INT32.
GPSIMD engine#
Each GPSIMD engine consists of eight fully-programmable 512-bit wide vector processors. They can execute general purpose C-code and access the embedded on-chip SRAM, allowing you to implement custom operators and execute them directly on the NeuronCores.
This document is relevant for: Trn2