
This document is relevant for: Inf1, Inf2, Trn1, Trn2, Trn3
Developer Guide - NeuronX Runtime#
This guide is intended to support a deeper understanding of the Neuron Runtime and how ML applications are built using the Runtime APIs directly, and focuses on the information you need to know when building custom frameworks that call libnrt APIs directly from C/C++ apps. It is applicable to developers building their own ML frameworks; if you are using a popular existing framework such as PyTorch, JAX, or TensorFlow, the concepts and techniques discussed in this guide do not apply to your work.
Note
The next few paragraphs provide a brief introduction to the Neuron hardware and the Neuron Runtime architecture. Customers who would rather skip this and jump straight to building their first ML application which runs without the aid of an ML framework, should go to Building your first Neuron application.
About the Neuron Runtime Library#
The Neuron Runtime Library (libnrt) is the intermediate layer between an application and a framework, and the Neuron driver and Neuron Devices. It provides a C API for initializing the Neuron hardware, staging models and input data, executing inferences and training iterations on the staged models, and retrieving output data. The vast majority of ML applications running on Neuron will follow one of the following 3 architectural templates:
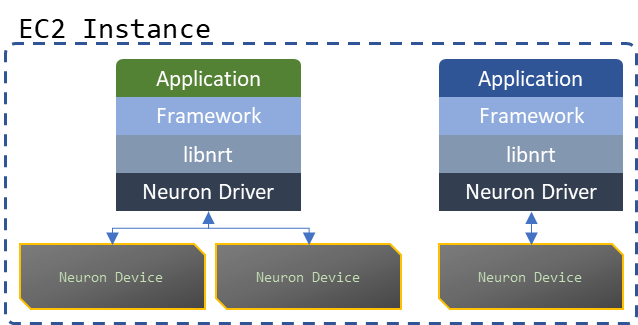
Fig. 13 Individual processes executing models on one or more Neuron Devices#
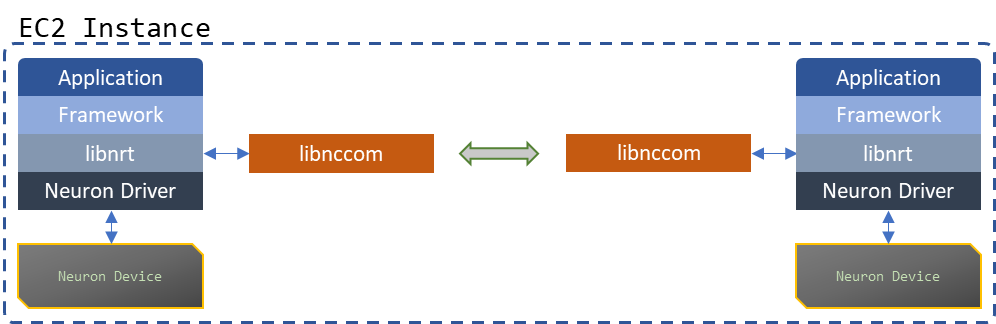
Fig. 14 Processes working together on executing models within the same instance - libnccom (The Neuron Collective Communication Library) handles inter-worker communication#
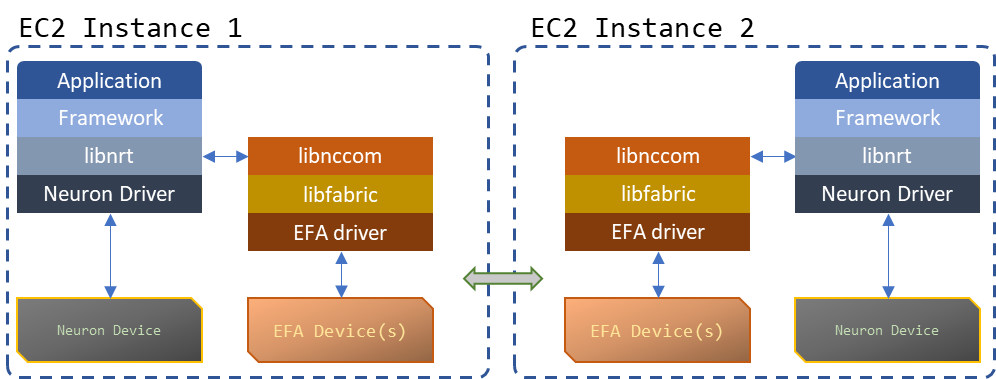
Fig. 15 Processes working together on executing models across multiple instances - libnccom, libfabric and the EFA driver handle communication#
Requirements#
A more comprehensive guide to installing Neuron software can be found in the Get Started with PyTorch Neuron guide.
The Neuron Runtime requires the Neuron Driver, which is provided by the aws-neuron-dkms package. Run the commands below to install the driver for the indicated operating system:
AL2023:
sudo dnf install aws-neuronx-dkms
Ubuntu:
sudo apt-get install aws-neuronx-dkms
The Runtime Library consists of the libnrt.so and header files. These artifacts are version-controlled and installed via the aws-neuronx-runtime-lib package. After installing the package, you will find the compied library file (libnrt.so) in
/opt/aws/neuron/lib and the necessary header files to use the APIs it provides in /opt/aws/neuron/include. Run the commands below to install the runtime library and headers for the indicated operating system:
AL2023:
sudo dnf install aws-neuronx-runtime-lib
Ubuntu:
sudo apt-get install aws-neuronx-runtime-lib
For applications that use distributed training or distributed inferences, the Neuron Collective Communication Library is required. Run the commands below to the library for the indicated operating system:
AL2023:
sudo dnf install aws-neuronx-collectives
Ubuntu:
sudo apt-get install aws-neuronx-collectives
In case of multi-instance training, you must also install the EFA driver and the Libfabric library (provided by the EFA installer). Run the command below to install it:
AL2023 & Ubuntu:
curl -O https://efa-installer.amazonaws.com/aws-efa-installer-latest.tar.gz
wget https://efa-installer.amazonaws.com/aws-efa-installer.key && gpg --import aws-efa-installer.key
cat aws-efa-installer.key | gpg --fingerprint
wget https://efa-installer.amazonaws.com/aws-efa-installer-latest.tar.gz.sig && gpg --verify ./aws-efa-installer-latest.tar.gz.sig
tar -xvf aws-efa-installer-latest.tar.gz
cd aws-efa-installer && sudo bash efa_installer.sh --yes
cd
sudo rm -rf aws-efa-installer-latest.tar.gz aws-efa-installer
Introduction to Neuron Hardware#
Neuron Machine Learning Accelerators (or Neuron Devices) are custom accelerators designed to efficiently run Machine Learning workloads such as inference using a given model or a distributed training job. Depending on the type of workload and its size, customers can opt for the following Neuron-equipped EC2 instances:
Workload type |
Neuron Device Name |
Instance type(s) |
Devices Per Instance |
Availability |
|---|---|---|---|---|
Inference |
Inferentia II (v3) |
inf2.xlarge, inf2.8xlarge |
1 |
Available Now! |
Inference |
Inferentia II (v3) |
inf2.24xlarge |
6 |
Available Now! |
Inference |
Inferentia II (v3) |
inf2.48xlarge |
12 |
Available Now! |
Inference |
Inferentia (v1) |
inf1.xlarge, inf1.2xlarge |
1 |
Available Now! |
Inference |
Inferentia (v1) |
inf1.6xlarge |
4 |
Available Now! |
Inference |
Inferentia (v1) |
inf1.24xlarge |
16 |
Available Now! |
Training |
Trainium (v2) |
trn1.2xlarge |
1 |
Available Now! |
Training |
Trainium (v2) |
trn1.32xlarge |
16 |
Available Now! |
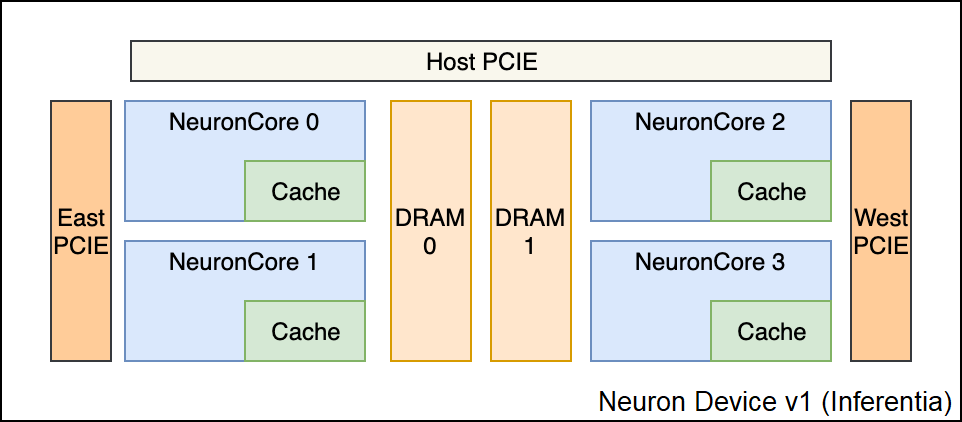
Neuron Device#
Each Neuron Device consists of multiple execution units called “NeuronCores”. They use high-bandwidth device memory and PCIe interfaces to coordinate with the host CPU and other Neuron Devices and components (depending on the Neuron Device version).
To get the number of NeuronCores per Neuron Device, the amount of Neuron Device memory, and the way devices are directly connected, use the neuron-ls tool by running the following command:
neuron-ls --topology
If successful, it will return output like this:
instance-type: trn1.32xlarge
instance-id: i-0633517e496256bf8
+--------+--------+--------+---------------+---------+
| NEURON | NEURON | NEURON | CONNECTED | PCI |
| DEVICE | CORES | MEMORY | DEVICES | BDF |
+--------+--------+--------+---------------+---------+
| 0 | 2 | 32 GB | 12, 3, 4, 1 | 10:1c.0 |
| 1 | 2 | 32 GB | 13, 0, 5, 2 | 10:1d.0 |
| 2 | 2 | 32 GB | 14, 1, 6, 3 | a0:1c.0 |
| 3 | 2 | 32 GB | 15, 2, 7, 0 | a0:1d.0 |
| 4 | 2 | 32 GB | 0, 7, 8, 5 | 20:1b.0 |
| 5 | 2 | 32 GB | 1, 4, 9, 6 | 20:1c.0 |
| 6 | 2 | 32 GB | 2, 5, 10, 7 | 90:1b.0 |
| 7 | 2 | 32 GB | 3, 6, 11, 4 | 90:1c.0 |
| 8 | 2 | 32 GB | 4, 11, 12, 9 | 20:1d.0 |
| 9 | 2 | 32 GB | 5, 8, 13, 10 | 20:1e.0 |
| 10 | 2 | 32 GB | 6, 9, 14, 11 | 90:1d.0 |
| 11 | 2 | 32 GB | 7, 10, 15, 8 | 90:1e.0 |
| 12 | 2 | 32 GB | 8, 15, 0, 13 | 10:1e.0 |
| 13 | 2 | 32 GB | 9, 12, 1, 14 | 10:1b.0 |
| 14 | 2 | 32 GB | 10, 13, 2, 15 | a0:1e.0 |
| 15 | 2 | 32 GB | 11, 14, 3, 12 | a0:1b.0 |
+--------+--------+--------+---------------+---------+
Neuron Device Topology
* * * *
│ │ │ │
▼ ▼ ▼ ▼
*––►[ 0 ]◄––►[ 1 ]◄––►[ 2 ]◄––►[ 3 ]◄––*
▲ ▲ ▲ ▲
│ │ │ │
▼ ▼ ▼ ▼
*––►[ 4 ]◄––►[ 5 ]◄––►[ 6 ]◄––►[ 7 ]◄––*
▲ ▲ ▲ ▲
│ │ │ │
▼ ▼ ▼ ▼
*––►[ 8 ]◄––►[ 9 ]◄––►[10 ]◄––►[11 ]◄––*
▲ ▲ ▲ ▲
│ │ │ │
▼ ▼ ▼ ▼
*––►[12 ]◄––►[13 ]◄––►[14 ]◄––►[15 ]◄––*
▲ ▲ ▲ ▲
│ │ │ │
* * * *
NeuronCore#
The NeuronCore is the primary execution unit within the accelerator. Each NeuronCore contains several execution engines (for different types of compute operations such as tensor-based, vector, and scalar), Direct Memory Access (DMA) engines, and a local cache.
A NeuronCore can operate independently or together with other NeuronCores, depending on the nature of the workload and the way a model is compiled and loaded to the NeuronCores in the accelerator. Each execution engine can access the cache and DRAM attached to the accelerator device. Data is transferred between the host CPU and the accelerator device (as well as between the device DRAM and NeuronCores) using DMA, which enables more efficient data movement.
The Neuron Runtime Architecture#
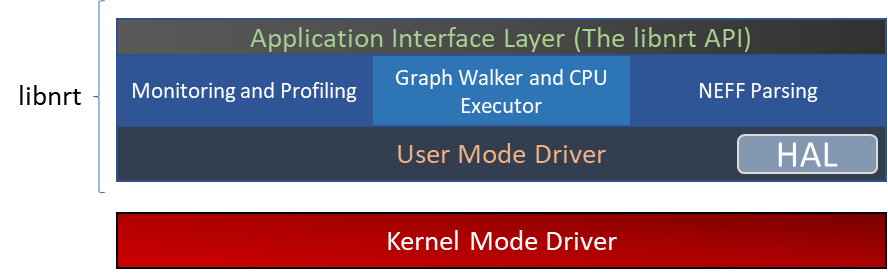
Application Interface Layer (The libnrt API)#
The Application Interface Layer allows applications and frameworks to use the available Neuron Devices to run inference or training workloads. A complete reference of the C interface can be found in The LIBNRT API.
Monitoring and Profiling#
The Neuron Runtime is able to capture key execution metrics which can be read in real-time using neuron-monitor and
neuron-top. neuron-monitor allows forwarding those metrics to CloudWatch or a Prometheus server, enabling fleet-wide
monitoring - for more on that please refer to the neuron-monitor usage guide Neuron Monitor User Guide.
Profiling an execution is another feature of the Neuron Runtime - which provides an API for starting and stopping profiling,
as well as saving the profile data to a file, which can be used by tools such as the Neuron Tensorboard. This API is
documented in The Profiling API section.
The NEFF format and NEFF Parser#
A NEFF (Neuron Executable File Format) is a single file container for all the artifacts needed to execute a model on one or more NeuronCores. A NEFF is the output of the Neuron Compiler (neuron-cc). It contains Neuron machine instructions, pseudo instructions (compiler-generated instructions which are parsed and replaced with Neuron instructions by the Neuron Runtime when the model loads), tensor information, model parameters and other components that support the model’s execution on one or more NeuronCores.
Operators that are not supported by Neuron can be compiled into CPU-executable binary and included into the NEFF as well.
Usually there is only one subgraph (which is executed on a single NeuronCore) in a NEFF:
NEFF Nodes:
NODE Executor Name Variable Size Type Format Shape DataType TimeSeries
1 Neuron Core sg00
image:0 3259008 IN NHWC [1 3 552 984]
net_output:0 1323972 OUT NHWC [1 78 69 123] false
In this example, there is a single subgraph, one input, and one output:

Some NEFFs can have multiple subgraphs (which are deployed by the runtime on separate NeuronCores) and multiple CPU operators, as demonstrated below:
NEFF Nodes:
NODE Executor Name Variable Size Type Format Shape DataType TimeSeries
1 Neuron Core sg00
input:0 2 IN NHWC [1 1 1 1]
nn/relu1:0 2 OUT NHWC [1 1 1 1] false
1 Neuron Core sg01
nn/relu1:0 2 IN NHWC [1 1 1 1]
nn/relu2:0 2 OUT NHWC [1 1 1 1] false
2 CPU fused_3_layout_transform
layout_transform0:0 0 OUT []
4 CPU fused_2_nn_conv2d_nn_relu
constant0 2 IN [1 1 1 1] float16
nn.relu0:0 0 OUT []
5 CPU fused_1_layout_transform_copy
nn/relu3:0 0 OUT []
6 Neuron Core sg02
nn/relu3:0 2 IN NHWC [1 1 1 1]
nn/relu4:0 2 OUT NHWC [1 1 1 1] false
6 Neuron Core sg03
nn/relu4:0 2 IN NHWC [1 1 1 1]
nn/output:0 2 OUT NHWC [1 1 1 1] false
The output above is summarized by the graph below:
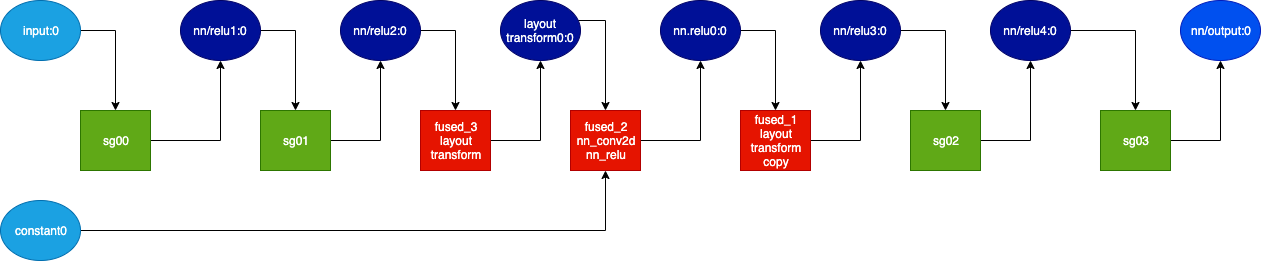
The nodes marked with dark blue are intermediate tensors that are handled internally by the Neuron Runtime. The other blue nodes are inputs/outputs. The green colored box indicates the operator is executed on the NeuronCore while the red color box indicates the execution is done on the CPU.
The NEFF layer in Neuron Runtime is responsible for parsing a NEFF, validating it, and translating pseudo instructions into hardware specific instructions and DMA descriptors.
Graph Walker and CPU Node Executor#
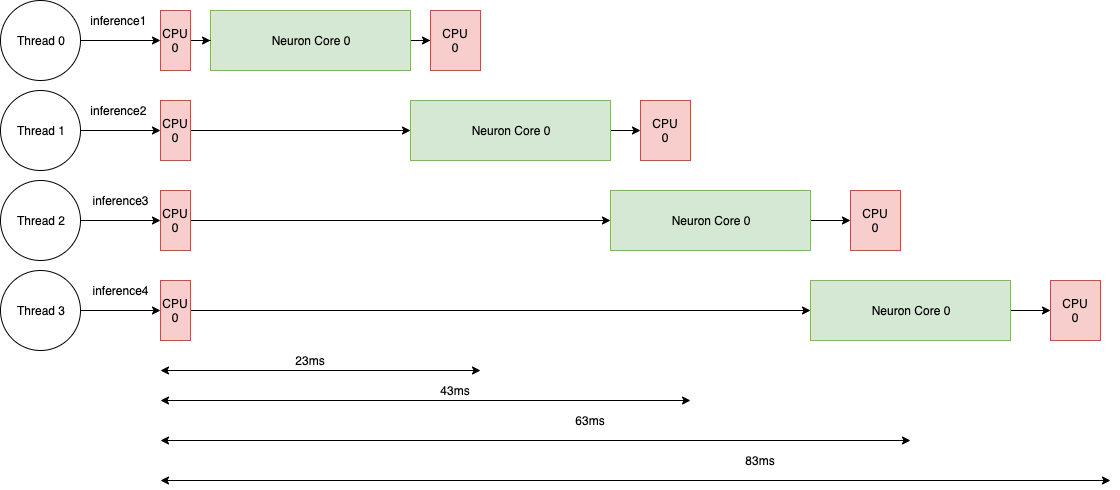
As shown in the previous section, a NEFF can contain one or more nodes. During execution, the Neuron Runtime Graph Walker executes each node
one by one and handles copying input and output between each of them. If a node needs to be executed by the CPU, then a corresponding library function, found
in a .so file in the NEFF, is dynamically loaded using dlopen() during model load and executed during model execution. Since this library function is executed in the calling
thread’s context, the workload can be efficiently parallelized using a multi-threaded approach.
In the example below, each invocation of nrt_execute() would take 23ms: the first CPU node takes 1ms, the NeuronCore execution takes 20ms and the second CPU node takes 2 ms,
so the total latency is 23ms and the throughput is 43 calls per second (1000/23).
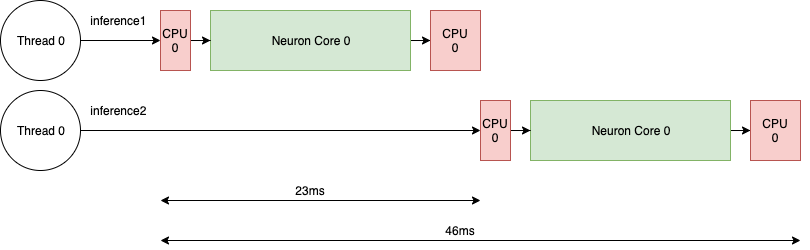
If multiple threads are used, subsequent executions would be pipelined inside the runtime, hence increasing the throughput in this case to ~50 (1000/20).
User Mode Driver#
This is the lowest level component of the Neuron Runtime and handles programming the engines, managing memory, creating DMA descriptors to move data from host and device, handling notifications etc.
Memory Management#
The Neuron Runtime is responsible with managing Neuron Device and host memory for the running models. The application is responsibile with
deallocating every loaded model and allocated tensor so the proper deallocation method needs to be called.
For more details, refer to The LIBNRT API documentation.
Tools such as neuron-top and neuron-monitor can be used to determine the amount of memory being used at any given time.
Building your first Neuron application#
The simple application presented here loads a NEFF file using the provided binary files’ contents as input tensors and saving the output tensors as binary files. If a file isn’t provided for an input tensor, that input tensor will be zero-filled.
Prerequisites#
Before you start, you must have the following available in your local environment:
A recent version of GCC C++ compiler
An installation of the
aws-neuronx-runtime-libpackage as described in Requirements
Running the built application requires:
A Neuron-equipped EC2 compute instance as shown in Introduction to Neuron Hardware
Installing the
aws-neuronx-runtime-liband theaws-neuronx-dkmspackage on the instance as described in RequirementsA NEFF file
Obtain a NEFF file#
When you run a workload through a Neuron framework, the compiled NEFFs are placed in /var/tmp/neuron-compile-cache.
Additionally, setting the NEURON_FRAMEWORK_DEBUG environment variable to 1 before running the workload enables
the compiled NEFFs to be written to the current directory.
Review of the example code#
This section breaks down the code example above to better illustrate the structure, flow, and calls in it.
Initialization and cleanup#
// ...
result = nrt_init(NRT_FRAMEWORK_TYPE_NO_FW, "", "");
// ...
nrt_close();
The Neuron Runtime is initialized by calling nrt_init and all applications should call nrt_close once they’re done
using it. For more details on these functions, go to the Initialization, configuration and teardown section.
Loading the NEFF#
Once the contents of a NEFF file have been mapped to virtual memory using mmap, load the NEFF with nrt_load.
// ...
void *mmap_file(const char *filepath, size_t *size) {
struct stat sb;
int fd = open(filepath, O_RDONLY);
if (fd < 0 || fstat(fd, &sb) != 0) {
fprintf(stderr, "Unable to open %s: %s\n", filepath, strerror(errno));
return MAP_FAILED;
}
*size = sb.st_size;
return mmap(NULL, sb.st_size, PROT_READ, MAP_PRIVATE, fd, 0);
}
// ...
neff_data = mmap_file(argv[1], &neff_size);
The runtime will decide the optimal placement for the model. Specifically, it chooses the optimal NeuronCore on which to deploy the model.
// ...
result = nrt_load(neff_data, neff_size, -1, -1, &model);
// ...
The call to nrt_load returns a valid model handle of type nrt_model_t*, which you can use for other calls to the Runtime API (such as nrt_execute).
For more details on the model API (including nrt_load), see The Model API.
Creating input/output tensors#
The main container for tensors is the nrt_tensor_set_t*. Tensors (nrt_tensor_t*) are not passed directly to the NEFF execution function (nrt_execute); rather,
they have to be wrapped as nrt_tensor_set_t*. The allocate_tensors function allocates the tensorset and the tensors for the requested usage type
(NRT_TENSOR_USAGE_INPUT or NRT_TENSOR_USAGE_OUTPUT) and returns the tensorset containing the allocated tensors in out_tset.
NRT_STATUS allocate_tensors(nrt_tensor_info_array_t *info_array, nrt_tensor_usage_t usage_type, nrt_tensor_set_t **out_tset) {
// ...
// We allocate a nrt_tensor_set which acts as a containers for nrt_tensors
result = nrt_allocate_tensor_set(out_tset);
// ...
for (tensor_idx = 0; tensor_idx < info_array->tensor_count; tensor_idx++) {
tensor_info = &info_array->tensor_array[tensor_idx];
if (tensor_info->usage != usage_type) {
continue;
}
// ...
// Allocate the tensor with the name and size found in tensor_info_array
result = nrt_tensor_allocate(NRT_TENSOR_PLACEMENT_DEVICE, 0, tensor_info->size,
tensor_info->name, &tensor);
// ...
// Finally add the tensors to the newly allocated tensor set
result = nrt_add_tensor_to_tensor_set(*out_tset, tensor_info->name, tensor);
// ...
}
// ...
}
Iterating through tensors in an nrt_tensor_set_t#
A helper function, iterate_tensors, is defined and implemented to iterate through the nrt_tensor_t values in a tensorset and call the function
handler for each of them. If the handler function returns false, iteration ends. iterate_tensors returns the first error
reported by the handler function.
// Tensor iterator handler - returns false if the iteration needs to stop
typedef bool (*tensor_handler)(nrt_tensor_t *, nrt_tensor_info_t *, NRT_STATUS *, void *);
NRT_STATUS iterate_tensors(nrt_tensor_set_t *tset, nrt_tensor_info_array_t *info_array, nrt_tensor_usage_t usage_type,
tensor_handler handler, void *args) {
// ...
for (tensor_idx = 0; tensor_idx < info_array->tensor_count; tensor_idx++) {
// ...
result = nrt_get_tensor_from_tensor_set(tset, tensor_info->name, &tensor);
// ...
if ((*handler)(tensor, tensor_info, &result, args) == false) {
return result;
}
// ...
}
Deallocating input/output tensors#
After the execution is complete, the tensors are deallocated using iterate_tensors and the tensorsets are deallocated
using nrt_destroy_tensor_set:
iterate_tensors(inputs, tensor_info_array, NRT_TENSOR_USAGE_INPUT, handler_free_tensor, NULL);
iterate_tensors(outputs, tensor_info_array, NRT_TENSOR_USAGE_OUTPUT, handler_free_tensor, NULL);
nrt_destroy_tensor_set(&inputs);
nrt_destroy_tensor_set(&outputs);
The handler_free_tensor function simply deallocates the given tensor:
bool handler_free_tensor(nrt_tensor_t *tensor, nrt_tensor_info_t *tensor_info, NRT_STATUS *result, void* args) {
// ...
nrt_tensor_free(&tensor);
// ...
}
Executing the NEFF#
Execute the NEFF by calling nrt_execute. If nrt_execute completes successfully, the output tensors are
read and saved to files (one binary file per output tensor) using iterate_tensors:
// Executing model using the tensors in the inputs tensorset and writing the outputs to the tensors
// in the outputs tensorset
result = nrt_execute(model, inputs, outputs);
// ...
// Saving outputs to files
result = iterate_tensors(outputs, tensor_info_array, NRT_TENSOR_USAGE_OUTPUT, handler_save_outputs, NULL);
The iteration handler reads the tensor data and writes it to a file with the same name as the tensor:
bool handler_save_outputs(nrt_tensor_t *tensor, nrt_tensor_info_t *tensor_info, NRT_STATUS *result, void* args) {
// ...
void *tensor_data = malloc(tensor_info->size);
// ...
// Reading the tensor to the newly allocated buffer
*result = nrt_tensor_read(tensor, tensor_data, 0, tensor_info->size);
// ...
// Saving the tensor to a file
snprintf(filename, 280, "%s.out", tensor_info->name);
fd = open(filename, O_WRONLY | O_CREAT | O_TRUNC, 0644);
// ...
if (write(fd, tensor_data, tensor_info->size) != tensor_info->size) {
// ...
}
close(fd);
For more details on the execution API, go to the The Execution API section.
The LIBNRT API#
API Return Codes#
All API calls return an NRT_STATUS value representing the return status of the call. In case of an error, an error message
is logged (based on the logging settings). The table below contains all the possible error codes. Note that some error codes only apply to certain API calls.
For more details on these errors, refer the Neuron Runtime Troubleshooting on Inf1, Inf2 and Trn1 docs.
Name |
Return Code |
Error |
|---|---|---|
|
0 |
Call was successful |
|
1 |
Generic failure |
|
2 |
Invalid NEFF, bad instruction, bad DMA descriptor, input tensor name/size does not match the model, etc. |
|
3 |
Invalid handle (e.g. an invalid model handle) |
|
4 |
Failed to allocate a resource for the requested operation |
|
5 |
Operation timed out |
|
6 |
Hardware failure |
|
7 |
Too many pending |
|
9 |
The number of available NeuronCores is insufficient for the requested operation |
|
10 |
NEFF version unsupported |
|
13 |
Returned when attempting an API call when the library is not initialized |
|
14 |
Returned when attempting an API call after |
|
1002 |
Invalid input has been submitted to nrt_execute() |
|
1003 |
Execution completed with numerical errors (produced NaN) |
|
1004 |
Execution was completed with other errors, either logical (event double clear), or hardware (parity error) |
|
1005 |
The NeuronCore is locked (in use) by another model/thread |
|
1006 |
One or more indirect memcopies and/or embedding updates are out of bound due to input corruptions |
|
1200 |
Suspected hang in collectives operation due to hardware errors on this or other workers. |
|
1201 |
HBM Unrepairable Uncorrectable hardware error caused incorrect results |
|
1202 |
NeuronCore parity errors caused incorrect results |
|
1203 |
The DMA engine encountered an error and halted execution |
|
1204 |
Execution timed out due to dropped notifications. Likely caused by Hardware DMA Generation Engine (DGE) notifications |
|
1205 |
HBM Repairable Uncorrectable hardware error caused incorrect results |
|
1206 |
Network communication failed between Neuron hardware and Collectives |
Initialization, configuration and teardown#
-
NRT_STATUS nrt_init(nrt_framework_type_t framework, const char *fw_version, const char *fal_version)#
Initializes the Neuron Runtime’s internal state and the Neuron hardware’s state. This should be called before any other nrt_* call is attempted, although a small set of functions are exempt from this rule (such as
nrt_get_total_nc_countandget_nrt_version). Any call to the NRT library API will returnNRT_FAILUREifnrt_inithas not been called beforehand for any API call requires it.The runtime is configured by setting the appropriate environment variable before this API call. The list of available environment variables is found in the Environment variables used to configure the Runtime Library section.
- Parameters:
framework –
Can be one of:
NRT_FRAMEWORK_TYPE_INVALID, // Invalid framework NRT_FRAMEWORK_TYPE_NO_FW, // No framework NRT_FRAMEWORK_TYPE_TENSORFLOW, // Tensorflow NRT_FRAMEWORK_TYPE_PYTORCH, // Pytorch NRT_FRAMEWORK_TYPE_MXNET // MxnetThis argument is used by our Neuron Tools to determine the type of application running, it has no other impact on the functioning of the runtime. Application using a custom framework or calling the Neuron Runtime directly should use
NRT_FRAMEWORK_TYPE_NO_FW.*fw_version (const char) –
version of the framework on top of which this runtime is running
*fal_version (const char) –
version of the framework adapter on top of which this runtime is running
Applications using NRT_FRAMEWORK_TYPE_NO_FW for the first argument should use two empty strings for the versions.
Environment variables used to configure the Runtime Library#
NEURON_RT_LOG_LOCATION=<CONSOLE/SYSLOG>, default=CONSOLEChooses the output target for the Neuron Runtime logs (either console or syslog).
NEURON_RT_LOG_LEVEL=<ERROR/WARN/INFO/DEBUG/TRACE>, default=ERRORSpecifies the logging verbosity for the Neuron Runtime library, from ERROR (least verbose), to TRACE (most verbose).
NEURON_RT_NUM_CORES=<n>Specifies how many NeuronCores are needed for the application. During
nrt_initthe requested number of NeuronCores are exclusively associated with the calling processes and become unavailable to any other process attempting to use them. If there aren’t enough NeuronCores available,nrt_initwill return an error. Once the owner process has callednrt_closeor exited, the NeuronCores are released and become available to be associated with another process. By default, all NeuronCores present on the instance will be made available to the caller.NEURON_RT_VISIBLE_CORES=<m,n,p-q>Similarly to the previous, it allows the calling process to get exclusive access to a set of NeuronCores, but it allows explicitly specifying which NeuronCores are available for the application based on their zero-based indices. This variable can be a list of NeuronCores, for example:
NEURON_RT_VISIBLE_CORES=3,4,5,6, a range of NeuronCores, for example:NEURON_RT_VISIBLE_CORES=3-6, or a combination of both:NEURON_RT_VISIBLE_CORES=3-5,6. The resulting range must be contiguous, for example this is not valid:NEURON_RT_VISIBLE_CORES=3,5,6because 4 is missing from the list, and indices need to be provided in consecutive increasing order.Note
If both
NEURON_RT_VISIBLE_CORESareNEURON_RT_NUM_CORESare defined,NEURON_RT_VISIBLE_CORESwill be used.NEURON_RT_ROOT_COMM_ID=<ip_address:port>Mandatory for applications that run workloads containing Collective Communication operators, allows specifying the IP address and assign a port for the rank 0 worker in the Collective Compute worker pool. For example:
NEURON_RT_ROOT_COMM_ID=10.0.1.2:46820.NEURON_RT_STOCHASTIC_ROUNDING_SEED=<value>Allows setting a value for the stochastic rounding seed. Has no effect on inf1.
NEURON_RT_DEBUG_MEMLOG_MAX_SIZE=<value>, default=1024*1024Allows changing the number of entries in the memory allocations log. This log contains an entry for every allocation and deallocation and will be dumped to a file in case of a memory allocation failure in CSV format.
-
NRT_STATUS nrt_close()#
Closes all the devices used by the application (as defined by
NEURON_RT_NUM_CORES/NEURON_RT_VISIBLE_CORES) and cleans up the runtime state. Note that oncenrt_closehas been called, most nrt_* API calls will fail if attempted.
The Model API#
-
NRT_STATUS nrt_load(const void *neff_bytes, size_t size, int32_t start_nc, int32_t nc_count, nrt_model_t **model)#
Loads a NEFF file whose content is found in neff_bytes, with the given size, placing it on
nc_countNeuronCores starting with NeuronCore index start_nc. If eithernc_countorstart_ncare -1, an optimal value for each will be determined automatically. The model can be configured using a list of environment variables read inside this API call which can be found in the Environment variables used to configure a model being loaded section. It returns a handle to the loaded model in thenrt_model_t*pointer if the call succeeds. The returned handle represents the loaded model and can be used with calls that operate on annrt_model_t*(such asnrt_execute).- Parameters:
neff_bytes – Pointer to existing NEFF file data
size – Size of data in
neff_bytesstart_nc – Index of the NeuronCore on which to stage the model. The first NeuronCore owned by the application will always have the index
0- for example, even if when settingNEURON_RT_VISIBLE_CORES=3,4, the two NeuronCores will be referred to as0and1. If -1, an optimal index will be automatically determined (based on current NeuronCore usage).nc_count – Number of NeuronCores on which to stage the model. If its value is a multiple of the amount of NeuronCores needed by the model, the model will be replicated on the number of NeuronCores specified in the argument. This feature is called TBD and it will be explained in detail in a separate section. If its value is -1, the model will be staged a single time, using the number of cores needed by a single instance of the model.
model – Model handle returned by the call which can be passed to other functions that operate on models (such as
nrt_execute).
Environment variables used to configure a model being loaded#
NEURON_RT_EXEC_TIMEOUT=<n>, default=30 (inf1), default=600(trn1,inf2)Maximum of time, in seconds, allowed for one execution before timing out - which will cause the call to
nrt_executeto fail and returnNRT_TIMEOUT.NEURON_RT_VALIDATE_HASH=<true/false>, default=falseVerify the integrity of NEFF data being loaded by checking against a checksum found in the header.
NEURON_RT_STOCHASTIC_ROUNDING_EN=<true/false>, default=falseEnable stochastic rounding.
-
NRT_STATUS nrt_load_collectives(const void *neff_bytes, size_t size, int32_t start_nc, int32_t nc_count, uint32_t g_device_id, uint32_t g_device_count, nrt_model_t **model)#
Same as
nrt_load(same environment variables can be used to configure the model), but must be used when loading NEFFs containing Collective Communication operators. Uses the same arguments as nrt_load, but adds 2 extra ones.- Parameters:
neff_bytes – Pointer to existing NEFF file data
size – Size of data in
neff_bytesstart_nc – Index of NeuronCore on which to stage the model. If -1, an optimal index will be automatically determined (based on current NeuronCore usage).
nc_count – Number of NeuronCores on which to stage the model. If its value is a multiple of the amount of NeuronCores needed by the model, the model will be replicated on the number of NeuronCores specified in the argument. This feature is called TBD and it will be explained in detail in a separate section. If its value is -1, the model will be staged a single time, using the number of cores needed by a single instance of the model.
g_device_id – Globally unique ID within the Collective Communication world associated with this model instance.
g_device_count – Size of the Collective Communication world (total number of participating unique IDs).
model – Model handle returned by the call which can be passed to other functions that operate on models (such as
nrt_execute).
-
NRT_STATUS nrt_unload(nrt_model_t *model)#
Unloads the given model and frees up device and host resources.
- Parameters:
model – Pointer to model to unload. All data associated with the model is deleted, do not reuse the pointer or try to deallocate it afterwards. Do not call
nrt_unloadagain on the samenrt_model_t*pointer (think of it as a call to free()).
-
NRT_STATUS nrt_get_model_nc_count(const nrt_model_t *model, uint32_t *nc_count)#
Gets the number of NeuronCores used by the model and writes that value at the address pointed by
nc_count.- Parameters:
model – Valid pointer to an
nrt_model_t.nc_count – If the call completes successfully, the pointed address will contain the number of NeuronCores used by the model.
-
NRT_STATUS nrt_get_model_tensor_info(nrt_model_t *model, nrt_tensor_info_array_t **tensor_info)#
Gets input/output tensor information for a given loaded model.
- Parameters:
model – Valid pointer to an
nrt_model_t.tensor_info –
Pointer to a
nrt_tensor_info_array_t*which will contain the tensor information data. The function allocates memory for the structure internally which can only be correctly freed by callingnrt_free_model_tensor_info. Thenrt_tensor_info_array_tstruct and its dependencies are defined as follows:typedef struct nrt_tensor_info_array { uint64_t tensor_count; // Total number of input/output tensors used by the model nrt_tensor_info_t tensor_array[]; // Array of tensor info representing those tensors } nrt_tensor_info_array_t; typedef struct nrt_tensor_info { char name[NRT_TENSOR_NAME_MAX]; // Name of the tensor nrt_tensor_usage_t usage; // Type of the tensor size_t size; // Tensor size in bytes nrt_dtype_t dtype; // Data type uint32_t *shape; // An array representing data shape uint32_t ndim; // The number of dimensions (number of elements in the shape array) } nrt_tensor_info_t; // Usage type definitions for tensors typedef enum nrt_tensor_usage { NRT_TENSOR_USAGE_INPUT = 0, // Tensor is used for input NRT_TENSOR_USAGE_OUTPUT, // Tensor is used for output } nrt_tensor_usage_t; // Data type definitions for tensors typedef enum nrt_dtype { NRT_DTYPE_UNKNOWN = 0, NRT_DTYPE_FLOAT32, NRT_DTYPE_FLOAT16, NRT_DTYPE_BFLOAT16, NRT_DTYPE_INT8, NRT_DTYPE_UINT8, NRT_DTYPE_INT16, NRT_DTYPE_UINT16, NRT_DTYPE_INT32, NRT_DTYPE_UINT32, NRT_DTYPE_INT64, NRT_DTYPE_UINT64 } nrt_dtype_t;
-
NRT_STATUS nrt_free_model_tensor_info(nrt_tensor_info_array_t *tensor_info)#
Frees a
nrt_tensor_info_array_tallocated by a call tonrt_get_model_tensor_info. As with all deallocation functions, don’t call it more than once on the same pointer.- Parameters:
tensor_info –
nrt_tensor_info_array_tto deallocate.
-
NRT_STATUS nrt_get_model_instance_count(nrt_model_t *model, uint32_t *instance_count)#
Returns the number of times this nrt_model_t `is currently staged on the NeuronDevice(s) by writing it to the address pointed by ``instance_count`. It will always be >= 1. This value can be used to determine the number of threads that can optimally call
nrt_executeon thisnrt_model_t.- Parameters:
model – Valid pointer to an
nrt_model_t.instance_count – If the call completes successfully, the address will contain the instance count for this model
The Tensor API#
-
NRT_STATUS nrt_tensor_allocate(nrt_tensor_placement_t tensor_placement, int logical_nc_id, size_t size, const char *name, nrt_tensor_t **tensor)#
Allocates a new tensor, placing it in either host virtual memory or device memory (based on the
tensor_placementargument), on the specified NeuronCore index, of a given size, and attaches the given name to it - the name is only used for log messages. For applications running on Inferentia,tensor_placementshould always beNRT_TENSOR_PLACEMENT_VIRTUAL. For all other cases,NRT_TENSOR_PLACEMENT_DEVICEshould be used. If successful, thetensoraddress will contain a valid pointer to the newly allocatednrt_tensor_t. (depricated)tensor_placementset toNRT_TENSOR_PLACEMENT_HOSTwill allocate tensors in physical host memory. Tensors allocated withNRT_TENSOR_PLACEMENT_HOSTcannot be larger than 4MB, the Kernel physical page size limit. We restrict tensors to a single page of host memory to simplify the generation of DMA descriptors during pre-execution setup.- Parameters:
tensor_placement –
Controls where the tensor will be placed, the definition of the
nrt_tensor_placement_tenum is as follows:typedef enum { NRT_TENSOR_PLACEMENT_DEVICE, // the tensor is allocated directly in device memory NRT_TENSOR_PLACEMENT_HOST, // (depricated) the tensor is allocated in DMAable host memory (only for sizes < 4MB) NRT_TENSOR_PLACEMENT_VIRTUAL // the tensor is allocated in host memory } nrt_tensor_placement_t;
logical_nc_id (int) – Zero-based NeuronCore index on which to allocate the tensor (if
tensor_placementisNRT_TENSOR_PLACEMENT_DEVICE) or to which associate the tensor for all other cases.size – Size for the new tensor.
name – Name for the new tensor.
tensor – If the call completes successfully, the address will contain a valid
nrt_tensor_t*pointer.
-
void nrt_tensor_free(nrt_tensor_t **tensor)#
Frees a tensor allocated by a call to
nrt_tensor_allocateand sets the nrt_tensor_t* pointer at addresstensorto NULL.- Parameters:
tensor – Pointer to a pointer to a previously allocated nrt_model_t. After the call returns, the
nrt_model_t*pointer will be NULL.
-
NRT_STATUS nrt_tensor_read(const nrt_tensor_t *tensor, void *buf, size_t offset, size_t size)#
Reads
sizebytes of data from a given tensor, starting atoffset, tobufstarting at offset 0.bufneeds to be allocated with a size of at leastsizebytes.- Parameters:
tensor – Valid pointer to an
nrt_tensor_t.buf – Buffer where to write read data, it needs to be at least size bytes in size.
offset – Offset within the tensor from which to begin reading.
size – Size to read.
-
NRT_STATUS nrt_tensor_write(nrt_tensor_t *tensor, const void *buf, size_t offset, size_t size)#
Writes
sizebytes of data to a given tensor, starting atoffset, frombuf(starting at offset 0).- Parameters:
tensor – Valid pointer to an
nrt_tensor_t.buf – Buffer containing
sizebytes of data to write to the tensor.offset – Offset within the tensor from which to begin writing.
size – Size to write.
-
size_t nrt_tensor_get_size(const nrt_tensor_t *tensor)#
Returns the size, in bytes, of the given tensor.
- Parameters:
tensor – Valid pointer to an
nrt_tensor_t.
- Returns:
Size in bytes of the given tensor.
-
NRT_STATUS nrt_tensor_allocate_empty(const char *name, nrt_tensor_t **tensor)#
Allocates an empty tensor, i.e. the tensor structure w/o any attached storage.
- Parameters:
name – Name for the new tensor.
tensor – If the call completes successfully, the address will contain a valid
nrt_tensor_t*pointer.
-
NRT_STATUS nrt_tensor_attach_buffer(nrt_tensor_t *tensor, void *buffer, size_t size)#
Attaches a caller-supplied buffer to a tensor. Any storage previously attached to the tensor is detached and freed if was owned by the tensor. The attached buffer is managed by the caller and must persist through the entire lifetime of the tensor - calling nrt_tensor_free will not deallocate it. This changes the memory placement of the nrt_tensor_t to
NRT_TENSOR_PLACEMENT_VIRTUALregardless of the initial memory placement type.- Parameters:
tensor – Valid pointer to an
nrt_tensor_t.buffer – Buffer of
sizebytes to attach to the tensor.size – Size of attached buffer.
-
NRT_STATUS nrt_tensor_allocate_slice(const nrt_tensor_t *tensor_source, size_t offset, size_t size, const char *name, nrt_tensor_t **tensor_slice)#
Allocates a new
nrt_tensor_tthat doesn’t have its own backing storage - instead, it will use a part (slice) oftensor_source’s storage, starting atoffsetwith the given size. The shared backing storage is reference counted and it will not be deallocated until the last tensor using it is deallocated.- Parameters:
tensor_source – Valid pointer to a
nrt_tensor_twhose storage will be used by the new tensor.offset – Offset within the
tensor_sourceused as origin for the ‘slice’.size – Size of storage to be used by the new tensor.
name – Name for the new tensor.
tensor_slice – If the call completes successfully, the address will contain a valid, newly allocated,
nrt_tensor_t*pointer.
-
void *nrt_tensor_get_va(const nrt_tensor_t *tensor)#
Returns the virtual address for an allocated tensor.
- Parameters:
tensor – Valid pointer to an
nrt_tensor_t.
- Returns:
Pointer to host memory used by the tensor.
-
NRT_STATUS nrt_tensor_check_output_completion(const nrt_tensor_t *output_tensor, int64_t timeout, uint64_t expected_completion_count)#
Checks if the output tensor has been completely written to by the Neuron Runtime. It waits for up to
timeoutmicroseconds, or unlimited iftimeoutis negative, until the tensor reaches the expected completion count. If thetimeoutis given as unbounded, it emits a warning at the first 30 seconds. The caller is in charge of handling the timeout behavior. If the tensor is complete, it returnsNRT_SUCCESS; if the output tensor is given as NULL, it returnsNRT_INVALID; if the tensor does not reach theexpected_completion_countwithin the timeout, it returnsNRT_TIMEOUT.- Parameters:
output_tensor – Valid pointer to an
nrt_tensor_t, which is expected to be an output tensor.timeout – Maximum time to wait for the output tensor to be written to, in microseconds. If negative, it waits indefinitely until the tensor is complete.
expected_completion_count – The number of completions expected by the caller.
_api_tensorset:
The Tensorset API#
Tensorsets are containers for tensors.
-
NRT_STATUS nrt_allocate_tensor_set(nrt_tensor_set_t **result)#
Allocates an empty
nrt_tensor_set_tand places its address inresult.- Parameters:
result – If the call completes successfully, this address will contain a pointer to a valid, newly allocated
nrt_tensor_set_t.
-
void nrt_destroy_tensor_set(nrt_tensor_set_t **tensor_set)#
Frees a tensor set allocated by a call to
nrt_allocate_tensor_setand sets thenrt_tensor_set_t*pointer at addresstensor_setto NULL.- Parameters:
tensor_set – Pointer to a pointer to a previously allocated
nrt_tensor_set_t. After the call returns, thenrt_tensor_set_t*pointer will be NULL.
-
NRT_STATUS nrt_add_tensor_to_tensor_set(nrt_tensor_set_t *tensor_set, const char *tensor_name, nrt_tensor_t *tensor)#
Adds an
nrt_tensorto a tensor_set under a given name. That name can be later used to retrieve the tensor.- Parameters:
tensor_set – Pointer to a valid Tensorset where to add the tensor.
tensor_name – Name that will be used to access the added tensor in the container. Does not need to be the same as the
nrt_tensor_t’s name.tensor – Pointer to a valid
nrt_tensor_tto ad to the Tensorset.
-
NRT_STATUS nrt_get_tensor_from_tensor_set(nrt_tensor_set_t *tensor_set, const char *tensor_name, nrt_tensor_t **tensor)#
Gets an
nrt_tensorfrom the tensor set based on the name used when it was added bynrt_add_tensor_to_tensor_setand places its address at the address pointed bytensor. If the tensor is not found,NRT_FAILUREis returned and nothing gets written at the address pointed bytensor.- Parameters:
tensor_set – Pointer to a valid Tensorset containing the tensor.
tensor_name – Name associated with the searched
nrt_tensor_twhen it was added to this Tensorset. Might be different from thenrt_tensor_t’s internal name.tensor – Address where the address of the found
nrt_tensor_twill be placed.
The Execution API#
-
NRT_STATUS nrt_execute(nrt_model_t *model, const nrt_tensor_set_t *input_set, nrt_tensor_set_t *output_set)#
Runs one execution of the given
nrt_model_tusing the provided input tensor set and writing the results to the provided output tensor set.- Parameters:
model – Valid pointer to a nrt_model_t on which to run the execution.
input_set – Tensorset containing input data.
input_set – Tensor set where the output data will be written to.
-
NRT_STATUS nrt_execute_repeat(nrt_model_t *model, const nrt_tensor_set_t *input_set, nrt_tensor_set_t *output_set, int repeat_count)#
Same as
nrt_executebut it will repeat the executionrepeat_counttimes using the outputs from the n - 1th iteration as inputs for the nth iteration. This requires a specially compiled NEFF and it’s not a commonly used call.- Parameters:
model – Valid pointer to a nrt_model_t on which to run the execution.
input_set – Tensorset containing input data.
input_set – Tensor set where the output data will be written to.
repeat_count – Number of times to repeat this execution.
The Profiling API#
-
NRT_STATUS nrt_profile_start(nrt_model_t *model, const char *filename)#
Begins profiling of the execution of the given model. The profile data will be written to the file specified by the path in
filename. The file will be truncated if it exists.- Parameters:
model – Valid pointer to a nrt_model_t which will be profiled by the Neuron Runtime during execution.
filename – Path to a file where the profile will be written. If the file already exists, it will be truncated.
-
NRT_STATUS nrt_profile_stop(const char *filename)#
Ends profiling of the execution of a model and writes profile data to
filename.filenameneeds to be the same path as the one used fornrt_profile_start.- Parameters:
filename – Path to a file where the profile will be written. If the file already exists, it will be truncated.
The Debug Stream API#
See Neuron Debug Stream API Documentation for more details.
-
NRT_STATUS nrt_debug_client_connect(int logical_nc_idx, int *stream_fd)#
Establishes a connection to a specified Logical Neuron Core’s debug stream and returns a handle to the stream in the
stream_fdparameter. Note that only one client can connect to a Logical Neuron Core’s stream at any given time. Attempts to connect to a stream with multiple clients will result in aNRT_INVALIDreturn status.- Parameters:
logical_nc_idx – Core’s debug stream to connect to
stream_fd – Connection handle to reference and interact with the stream
- Returns:
NRT_SUCCESSon success
-
void nrt_debug_client_connect_close(int stream_fd)#
Closes a connection created by
nrt_debug_client_connect.- Parameters:
stream_fd – Connection handle to close
-
NRT_STATUS nrt_debug_client_read_one_event(int stream_fd, ndebug_stream_event_header_t *header, void **payload)#
Consumes a single event from the stream and return it in
headerandpayload. Note that it is the user’s responsibility to free the payload pointer. Also keep in mind that this function must be called from the same process that owns the Logical Neuron Core. Calling this function from any other process results in undefined behavior.- Parameters:
stream_fd – Stream to consume an event from
header – Consumed event’s header
payload – Consumed event’s payload (caller’s responsibility to free this pointer)
- Returns:
NRT_SUCCESSon success orNRT_QUEUE_EMPTYif no events are available
Other APIs#
-
NRT_STATUS nrt_get_version(nrt_version_t *ver, size_t size)#
Fills a
nrt_version_tstruct with the provided size with version info. Thesizeargument allows for backwards compatibility. if the struct changes in future releases.- Parameters:
*ver –
Pointer to a
nrt_version_tstructure which is currently defined as:typedef struct nrt_version { uint64_t rt_major; // major version number uint64_t rt_minor; // minor version number uint64_t rt_patch; // patch version number uint64_t rt_maintenance; // maintainance version number char rt_detail[RT_VERSION_DETAIL_LEN]; // runtime version description string char git_hash[GIT_HASH_LEN]; // runtime git hash } nrt_version_t;
size (size_t) – Size of the
nrt_version_tstructure, should always besizeof(nrt_version_t)
-
NRT_STATUS nrt_get_total_nc_count(uint32_t *nc_count)#
Gets the total number of NeuronCores present on the current instance. The result is not affected by the values in
NEURON_RT_NUM_CORESorNEURON_RT_VISIBLE_CORESand, in fact, this function can be called before callingnrt_init.- Parameters:
nc_count – If the call completes successfully, the address will contain the total number of NeuronCores present on the instance.
-
NRT_STATUS nrt_get_visible_nc_count(uint32_t *nc_count)#
Gets the total number of NeuronCores available to the application after
nrt_inithas parsed the configuration environment variablesNEURON_RT_NUM_CORESandNEURON_RT_VISIBLE_CORES(if provided).- Parameters:
nc_count – If the call completes successfully, the address will contain the total number of NeuronCores available to the application.
This document is relevant for: Inf1, Inf2, Trn1, Trn2, Trn3